Autonomous Flight Systems
Autonomous Flight Systems
Autonomous Flight Systems
Overview
This course focuses on how a real autonomous flight system is structured, validated, and brought online safely. Students move beyond basic flight control and learn how autonomous behaviors are designed, gated, and executed under real-world constraints.
Rather than relying on scripted actions, students build autonomy incrementally by designing system architectures, defining state machines, and introducing autonomous behaviors such as takeoff, navigation, and motion control. Emphasis is placed on safety, observability, and validation—ensuring autonomous behaviors are tested in simulation before deployment to real hardware.
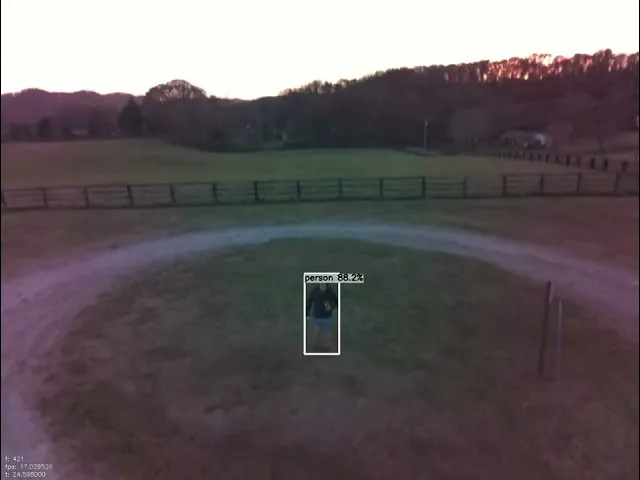
By the end of the course, students understand how autonomous flight systems transition between states, respond to system conditions, and produce smooth, controlled motion using real-time state information. The course concludes with a preview of perception-driven autonomy, setting the stage for more advanced tracking and estimation work.
Overview
This course focuses on how a real autonomous flight system is structured, validated, and brought online safely. Students move beyond basic flight control and learn how autonomous behaviors are designed, gated, and executed under real-world constraints.
Rather than relying on scripted actions, students build autonomy incrementally by designing system architectures, defining state machines, and introducing autonomous behaviors such as takeoff, navigation, and motion control. Emphasis is placed on safety, observability, and validation—ensuring autonomous behaviors are tested in simulation before deployment to real hardware.
By the end of the course, students understand how autonomous flight systems transition between states, respond to system conditions, and produce smooth, controlled motion using real-time state information. The course concludes with a preview of perception-driven autonomy, setting the stage for more advanced tracking and estimation work.
Overview
This course focuses on how a real autonomous flight system is structured, validated, and brought online safely. Students move beyond basic flight control and learn how autonomous behaviors are designed, gated, and executed under real-world constraints.
Rather than relying on scripted actions, students build autonomy incrementally by designing system architectures, defining state machines, and introducing autonomous behaviors such as takeoff, navigation, and motion control. Emphasis is placed on safety, observability, and validation—ensuring autonomous behaviors are tested in simulation before deployment to real hardware.
By the end of the course, students understand how autonomous flight systems transition between states, respond to system conditions, and produce smooth, controlled motion using real-time state information. The course concludes with a preview of perception-driven autonomy, setting the stage for more advanced tracking and estimation work.
Outcomes
-
Design and reason about autonomous flight architectures, including safety gates and state machines
-
Implement autonomous takeoff, landing, and navigation in both simulation and real hardware
-
Execute autonomous flight using GPS and local NED position and velocity commands on real and simulated drones
-
Shape autonomous motion using rate limits, smoothing, and constraint-based control
-
Diagnose and debug autonomous flight behavior using telemetry and system state
-
Validate autonomous behaviors in SITL before deploying to real hardware
Outcomes
-
Design and reason about autonomous flight architectures, including safety gates and state machines
-
Implement autonomous takeoff, landing, and navigation in both simulation and real hardware
-
Execute autonomous flight using GPS and local NED position and velocity commands on real and simulated drones
-
Shape autonomous motion using rate limits, smoothing, and constraint-based control
-
Diagnose and debug autonomous flight behavior using telemetry and system state
-
Validate autonomous behaviors in SITL before deploying to real hardware
Outcomes
-
Design and reason about autonomous flight architectures, including safety gates and state machines
-
Implement autonomous takeoff, landing, and navigation in both simulation and real hardware
-
Execute autonomous flight using GPS and local NED position and velocity commands on real and simulated drones
-
Shape autonomous motion using rate limits, smoothing, and constraint-based control
-
Diagnose and debug autonomous flight behavior using telemetry and system state
-
Validate autonomous behaviors in SITL before deploying to real hardware